


編集部
日常生活アシストから原子炉内部調査まで! 福島大学 共生システム理工学類 高橋研究室(メカトロニクス研究室)
<高橋 隆行>
研究室の紹介
研究テーマは,以下の4つの柱を中心に構成しています.
①人支援ロボット
②水中ロボット
③廃炉用ロボット
④機能的電気刺激を用いた障がい者支援システム
①は日常生活の中でパートナとして人と一緒に活動できるロボットを開発することが目標です.
②は放射能調査のための猪苗代湖など湖沼の湖底泥サンプリングを目的としたロボットです.
③は原子炉内部調査を行うために,先端にカメラや線量計などを取り付けることを想定した高剛性ロボット・アームで,伸展時に数mに伸びるとともに細いドラムに巻き取って直径100mmのパイプの中を通過することが可能です.
④は電気刺激により人の筋肉を直接動かして,脳卒中や脊髄損傷により麻痺した脚や手指の運動を再建して障がい者を支援することが目的です.
これらのロボットを実現するために必要となるさまざまな要素技術を開発しながら,最終目標を目指して,実際に動く・役立つという視点を大切にしながら,常時10以上の研究テーマで活動を展開しています.
構成員 教授:高橋 隆行,特任助教:情野 瑛,職員2名,研究員4名,大学院生7名,学類生8名,交換留学生1名,大学発ベンチャー社員6名
特筆する研究成果
小型軽量,ガタがない立体カム機構
図1は,ガタがほとんどない精密な動力伝達を実現する立体カム機構です.前記①のロボット用ハンドの指関節機構のために開発しました.これまでのロボットハンドの指関節には,ワイヤ・プーリやかさ歯車などの機構が用いられてきましたが,小型軽量でガタのない機構の実現は困難でした.開発した立体カム機構では,3次元的に精密に形成された1対のカム曲面を2個のフォロア・アームが挟みながら動くことでガタのない運動を実現します.この立体カム機構に加えて,ガタのない減速機も新たに開発しています.これらの機構はロボットハンド以外にもさまざな機械に広く応用できるため,その実用化を目指した福島大学発ベンチャー企業が2015年に設立されています.
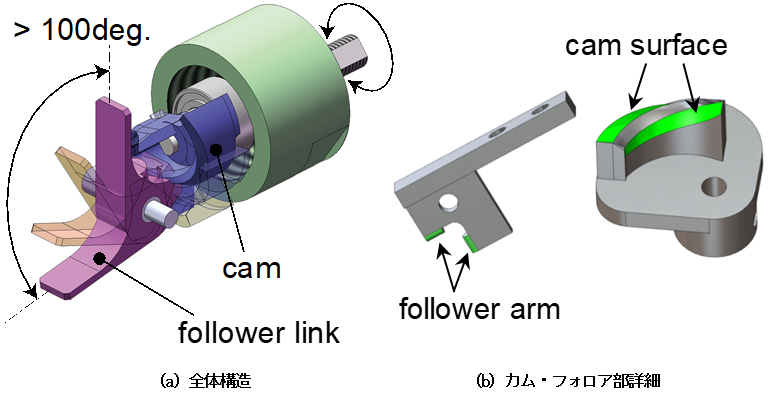
図1 立体カム機構
ロボットの複雑な曲面に対応! 塗って作る接触センサ
写真1は,ペンキのように塗ることで作成できる接触センサ(実験用試作品)です.ロボットには物体との接触を検出するセンサが必須ですが,複雑な曲面に密着して全面を覆うことのできるセンサの実現は困難でした.開発したセンサは,厚さ数十μmの導電膜,圧電膜,抵抗膜が積層された構造になっていて,物体が接触することで圧電膜が発生する電圧を,抵抗膜を通して出力します.出力端子は複数あり,各電圧波形の遅延する時間が接触位置と端子間距離に応じて異なる現象を利用して接触位置を検出します.この信号遅延を用いた位置検出手法もこれまでにない方法です.
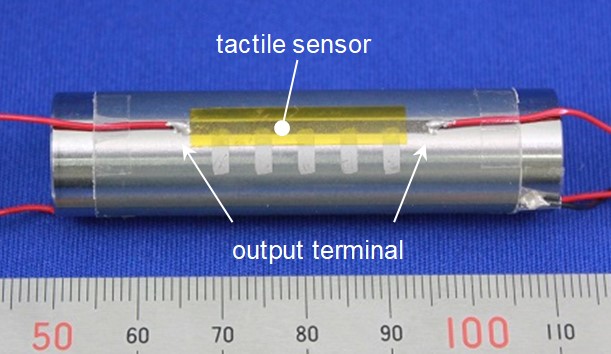
写真1 塗布により作成できる接触センサ
原子炉の内部調査に使える高剛性アーム
図2は,前記③の高剛性アームです.このアームの関節には低融点合金が埋め込まれており,これの溶融・凝固を利用して関節の可動・固定を切り替えることで多数の関節を直列に接続しながら高い剛性を実現しています.関節部の加熱には電磁誘導方式を用いており,非接触でコンパクトなシステムを実現します.
図2 巻き取り可能な高剛性アーム
▲関連特許
[1] 高橋 隆行 他5名;立体カム機構,特許4388566,2009.
[2] 高橋 隆行 他2名;変形クラウンギア減速機構,特許4511635,2010.
[3] 高橋 隆行 他4名;位置検出システム,特許6448084,2018.
◆福島大学 共生システム理工学類 メカトロニクス研究室のWebサイト
http://www.rb.sss.fukushima-u.ac.jp/
[本記事の情報は2020年1月時点のものです]
